Pick Up




更新情報などジーイングからのお知らせ
2015.10.10
今回はMoTeCのカムコントロールのお話です。
可変カムをコントロールするには、マグネットセンサーによりカム角の位置を認識し、ソレノイドバルブのデューティー変化でカムプーリー内の油量をコントロールして、クランクシャフトに対するカムの位相を変化させます。
文章にすれば簡単な事ですが、これが意外に大変で、カムを可変させるプーリーやソレノイドの特性・ECUの制御と全てがバランスしなくてはいけません。
「また、それを確認する意味で目視出来なければ、そうなっているだろうという予測にしかすぎません。」
純正のECUがどれほどのコントロール精度なのかは、見たことが無いので私には分かりません。 コンサルトでデーターに書き込んだ進角量と実際の進角量のどちらも見られるんですかね? 純正書き換えが出来るECUでもデーターに書き込んだ進角量がロガーに見られるだけで、実際進角した量は見られないのでは?と勝手に想像します。勝手な想像ですので、間違っていたら訂正します。
何故?こんな事を書くのかと言うと、使うECUの性能やオイルの特性や可変カムの性能により実際の進角量が進角目標値にあっているのかなど疑問に思っていたからです。
以前某メーカーの可変カムを使い、後付けコントローラーにてカムを色々変化させてセッティングしていました。その時には、変化量(入力した数字)がデジタルモニターで表示され、何も気にせず施工していました。
それから1年後にはECU本体で可変カムをコントロール出来るようになり、ロガー上でも見られるようになりました。それは入力した数値がロガーに表示されるだけで、その時も何も不思議に思わずセッティングしていた記憶があります。
その後のECUはバージョンアップして、データーに入力した入力値と目標値まで見られるようになりました。
その時です!何で入力した目標値と実際の変化量がズレているんだ??? 何度やっても目標値にならない。立ち上がりは遅く最大値にもならず、ズレる所は8°くらいある。ズレる分大きな数字を入れてもそんなに変わらないし・・・・
これってどうなの?P.I.D制御してないんじゃないの?いやっ多分してないし・・・ P.I.D制御していれば、オイルの種類や油温や油圧に左右されず、処理能力と通信速度さえあれば、 目標の値にピッタリ行くし、追従性も上がるんじゃないの?と思っていました。
新しいものを始めた時に、自分の知識が追い付かず目の前に見える物を信じてしまった訳です。 ソフト上に表示されているものは、自分で打ち込んだデーターですが、ロギングした時に、実際の数字なのか?また打ち込んだデーターを表示しているのか?を見極めないと、間違ったまま覚えてしまうという罠にはまる所でした。
点火時期などは、低回転と高回転でソフトに打ち込んだデーターと実際の数字を見てズレを確認し補正したりしているくせに、可変カムはその確認が出来ない為に鵜呑みにしてしまいました。 そうそうECUに点火時期を入力しログで確認しても、字際の点火時期はズレている事はよくありますからね。 点火MAPに全て20°と入力しアイドリング・4,000rpm・6,000rpmと回転を上昇させて、タイミングライトで見てみるとズレが一目瞭然。
そこでやっとMoTeCの話です。 MoTeCの場合は、ソレノイドの最適なデューティー値の入力からP.I.D制御まで、全て入力し可変カムを動かします。またエンジンの状態や条件によっても変化させる事が可能です。 そこで性能はと言うと、なんと!ブリッピングにもしっかりついてきます! 入力したデーター通り、0.5°以内のズレで目標値にピタリとはまります。0.5°はもう誤差ですよね。
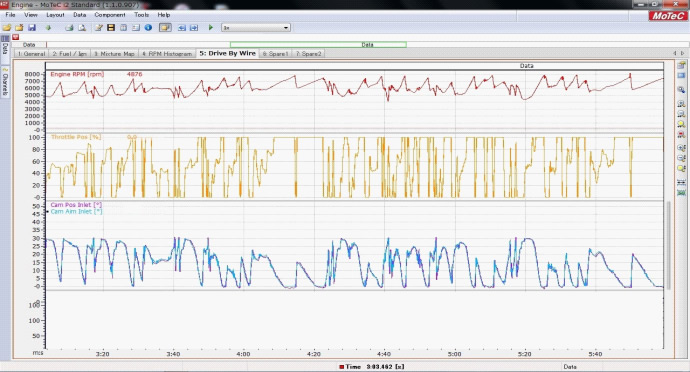
色々書かなくともMoTeCロガーを見れば一目瞭然でしょう
赤色線がエンジン回転数
オレンジ色線がスロットル開度
紫色線がCamPos(実際の変化量)
水色線がCamAim(目標値)
紫色線と水色線がほぼ重なっています。これがMoTeCカムコントロールの追従性です。 MoTeCカムコントロールはP.I.D制御で目標値にコントロールしますが、そのスピードがメチャクチャ速いです。この速さはスロットル開度の量やエンジン回転数に連動して追従しているのがロガーでも見て分かると思います。
MoTeCはカムコントロールだけではなく、他の制御に対しても同様でスピードや正確さを持っています。 ECUもメーカーによって得意・不得意な部分があります。 例えばアイドルコントロールの制御が苦手でワンテンポ遅れするとか、ラムダコントロールが苦手で反応が遅いとか、スロットル変化のスピードについてこられないとか、色々なECUを使うと見えてきますが、MoTeCは不得意な部分が無いに等しいかな~今の所・・・
誰もが普通にカムに入力した数値通りに動いていると思いますよね。当たり前の事で深く考える事でもないと思いました。が、違いました。 当たり前と思い込み、見逃している部分でした。
今回はMoTeCのカムコントロールのお話です。
可変カムをコントロールするには、マグネットセンサーによりカム角の位置を認識し、ソレノイドバルブのデューティー変化でカムプーリー内の油量をコントロールして、クランクシャフトに対するカムの位相を変化させます。
文章にすれば簡単な事ですが、これが意外に大変で、カムを可変させるプーリーやソレノイドの特性・ECUの制御と全てがバランスしなくてはいけません。
「また、それを確認する意味で目視出来なければ、そうなっているだろうという予測にしかすぎません。」
純正のECUがどれほどのコントロール精度なのかは、見たことが無いので私には分かりません。 コンサルトでデーターに書き込んだ進角量と実際の進角量のどちらも見られるんですかね? 純正書き換えが出来るECUでもデーターに書き込んだ進角量がロガーに見られるだけで、実際進角した量は見られないのでは?と勝手に想像します。勝手な想像ですので、間違っていたら訂正します。
何故?こんな事を書くのかと言うと、使うECUの性能やオイルの特性や可変カムの性能により実際の進角量が進角目標値にあっているのかなど疑問に思っていたからです。
以前某メーカーの可変カムを使い、後付けコントローラーにてカムを色々変化させてセッティングしていました。その時には、変化量(入力した数字)がデジタルモニターで表示され、何も気にせず施工していました。
それから1年後にはECU本体で可変カムをコントロール出来るようになり、ロガー上でも見られるようになりました。それは入力した数値がロガーに表示されるだけで、その時も何も不思議に思わずセッティングしていた記憶があります。
その後のECUはバージョンアップして、データーに入力した入力値と目標値まで見られるようになりました。
その時です!何で入力した目標値と実際の変化量がズレているんだ??? 何度やっても目標値にならない。立ち上がりは遅く最大値にもならず、ズレる所は8°くらいある。ズレる分大きな数字を入れてもそんなに変わらないし・・・・
これってどうなの?P.I.D制御してないんじゃないの?いやっ多分してないし・・・ P.I.D制御していれば、オイルの種類や油温や油圧に左右されず、処理能力と通信速度さえあれば、 目標の値にピッタリ行くし、追従性も上がるんじゃないの?と思っていました。
新しいものを始めた時に、自分の知識が追い付かず目の前に見える物を信じてしまった訳です。 ソフト上に表示されているものは、自分で打ち込んだデーターですが、ロギングした時に、実際の数字なのか?また打ち込んだデーターを表示しているのか?を見極めないと、間違ったまま覚えてしまうという罠にはまる所でした。
点火時期などは、低回転と高回転でソフトに打ち込んだデーターと実際の数字を見てズレを確認し補正したりしているくせに、可変カムはその確認が出来ない為に鵜呑みにしてしまいました。 そうそうECUに点火時期を入力しログで確認しても、字際の点火時期はズレている事はよくありますからね。 点火MAPに全て20°と入力しアイドリング・4,000rpm・6,000rpmと回転を上昇させて、タイミングライトで見てみるとズレが一目瞭然。
そこでやっとMoTeCの話です。 MoTeCの場合は、ソレノイドの最適なデューティー値の入力からP.I.D制御まで、全て入力し可変カムを動かします。またエンジンの状態や条件によっても変化させる事が可能です。 そこで性能はと言うと、なんと!ブリッピングにもしっかりついてきます! 入力したデーター通り、0.5°以内のズレで目標値にピタリとはまります。0.5°はもう誤差ですよね。
色々書かなくともMoTeCロガーを見れば一目瞭然でしょう
赤色線がエンジン回転数
オレンジ色線がスロットル開度
紫色線がCamPos(実際の変化量)
水色線がCamAim(目標値)
紫色線と水色線がほぼ重なっています。これがMoTeCカムコントロールの追従性です。 MoTeCカムコントロールはP.I.D制御で目標値にコントロールしますが、そのスピードがメチャクチャ速いです。この速さはスロットル開度の量やエンジン回転数に連動して追従しているのがロガーでも見て分かると思います。
MoTeCはカムコントロールだけではなく、他の制御に対しても同様でスピードや正確さを持っています。 ECUもメーカーによって得意・不得意な部分があります。 例えばアイドルコントロールの制御が苦手でワンテンポ遅れするとか、ラムダコントロールが苦手で反応が遅いとか、スロットル変化のスピードについてこられないとか、色々なECUを使うと見えてきますが、MoTeCは不得意な部分が無いに等しいかな~今の所・・・
誰もが普通にカムに入力した数値通りに動いていると思いますよね。当たり前の事で深く考える事でもないと思いました。が、違いました。 当たり前と思い込み、見逃している部分でした。