

Pick Up





ジーイング代表、前田 仁(Jin Maeda)です。 これまで、メーカーのエンジンに対する考え方、パワーと耐久性とバランス、ボディ補強、サスペンションのセッティング、 コンピューターのセッティング等、車に関するあらゆることを学んできました。このブログでは、 日々の仕事の様子を中心に発信しながら、車に楽しく乗りたいと思っている方々に、それらをフィードバックしていきます。
Automatic translation / From Japanese to English >
I have added an automatic translation in the hope that it will convey at least some of the nuances.2017.07.25
弊社ではRB26の弱点を信号系と考えています。
それは信号が正しくなければ、いくら良いエンジンとされているRB26本体の性能も半減されてしまいます。
乗る側はチューニングされて馬力を上げられれば本来のエンジンの制御もオブラートに包まれて分からなくなるでしょう。
乗れば以前よりパワーがあって速いし、トルクがあり別に問題ないのでは?と思うのが普通かな?
しかし弊社でもエンジン性能はいくらでも上げることは出来ますが、まずはその性能を出す為には制御系を信頼出来るECUや正確な信号にする事が本来基本で、それを踏まえた上でのチューニングではないかと考えています。
その為にエンジンの基本中の基本?エンジンを動かす為の神経?を何処まで精度を上げられるかを取り組み
タイミングベルトをギアトレインに変更しない限り、これ以上は限界という所まで作り上げました。
その結果信号の精度が上がり、燃料噴射や点火時期の精度が上がり、各気筒の噴射量や点火時期の最適化が図れ全てにおいてエンジンをワンランクもツーランクも上質なものに変えました。
エンジンの音質やマフラーからの音までRBらしくない上質な音に変化しました。
今回テストした車両はカムが280°でオーバーラップ60°以上ですがアイドリング時の安定性などはポンカムを入れた車両と同程度の感じになっています。
エンジンを回せばピストンスピードを考慮した上で9000rpmまで回してもエンジンが唸る事無く、高回転でもきめ細かな制御をしていますので安心して回す事が可能です。
リモコンエンジンスターターでの始動も普通に出来ますよ!
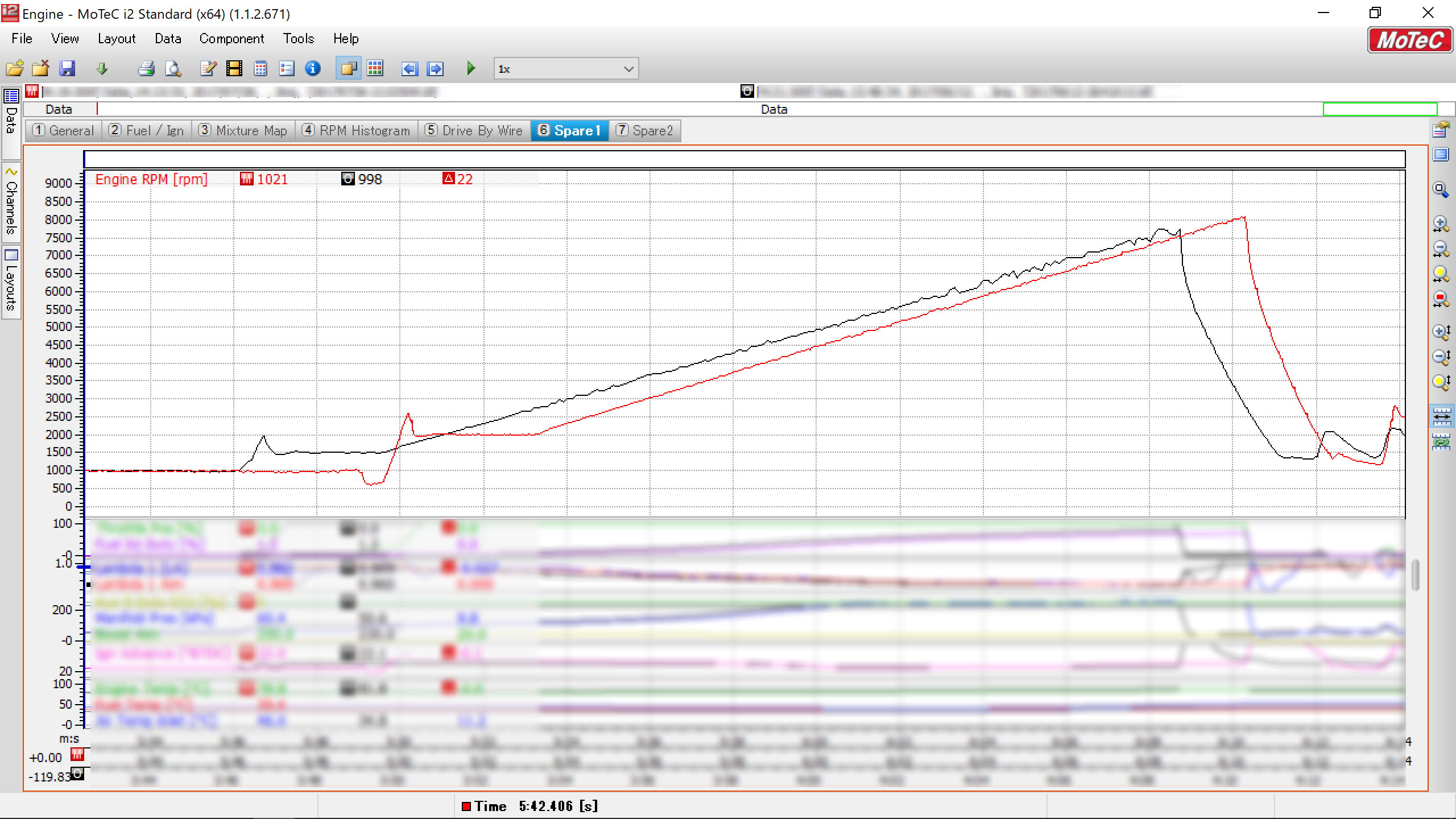
画像のグラフは、皆さんが使われている通常の信号(黒線)と今回信号を追求した赤線の比較です。
これを見ると黒線は燃料の噴射や点火時期の不安定が一目瞭然でエンジンパワーの陰に隠れて、知らずに回しているだけです。(見やすいように黒線と赤線は時間のオフセットをしています)
純正ECUだったら大丈夫なんでしょうか?いえいえ純正が一番酷いです。ECUが信号を読めずエラーが出る事は日常茶飯事ですよ。だから知らずに回してるだけです。
一度やってみたいのはポンカム+ブーストアップクラスに今回の制御系を見直したものでセッティングした場合にどれだけの物に仕上がるかを試してみたいです。
SSタービンクラスより早いかもしれませんよ~(*`艸´)ウシシシ
色々と書きましたが、このようなテストや悪い所を見つけ良くしていこうと思うとMoTeC M600を使用しないと信号の状態や正確さがみれません。どのくらい良くなったかを信号側から見る事が出来ないんですよ。
信号の精度を上げる方法ですが、予算もありますのでステップ1 ステップ2 ステップ3と3段階に分けて考えています。
通常はステップ1でMoTeC施工時には内容に入っています。しかしクランク角センサーの経年劣化により状態が悪い物もありますので要注意ですね。
ステップ2になると1より6000rpm以上の信号の安定性が更に向上し性能が上がります。
ステップ3になるとRBでは究極の仕様です。エンジンの仕様によっては「信号だけの精度を上げただけ」で高回転域で18馬力の向上が見られエンジンノイズの低減とスムーズな回転上昇が得られました。
弊社ではRB26の弱点を信号系と考えています。
それは信号が正しくなければ、いくら良いエンジンとされているRB26本体の性能も半減されてしまいます。
乗る側はチューニングされて馬力を上げられれば本来のエンジンの制御もオブラートに包まれて分からなくなるでしょう。
乗れば以前よりパワーがあって速いし、トルクがあり別に問題ないのでは?と思うのが普通かな?
しかし弊社でもエンジン性能はいくらでも上げることは出来ますが、まずはその性能を出す為には制御系を信頼出来るECUや正確な信号にする事が本来基本で、それを踏まえた上でのチューニングではないかと考えています。
その為にエンジンの基本中の基本?エンジンを動かす為の神経?を何処まで精度を上げられるかを取り組み
タイミングベルトをギアトレインに変更しない限り、これ以上は限界という所まで作り上げました。
その結果信号の精度が上がり、燃料噴射や点火時期の精度が上がり、各気筒の噴射量や点火時期の最適化が図れ全てにおいてエンジンをワンランクもツーランクも上質なものに変えました。
エンジンの音質やマフラーからの音までRBらしくない上質な音に変化しました。
今回テストした車両はカムが280°でオーバーラップ60°以上ですがアイドリング時の安定性などはポンカムを入れた車両と同程度の感じになっています。
エンジンを回せばピストンスピードを考慮した上で9000rpmまで回してもエンジンが唸る事無く、高回転でもきめ細かな制御をしていますので安心して回す事が可能です。
リモコンエンジンスターターでの始動も普通に出来ますよ!
画像のグラフは、皆さんが使われている通常の信号(黒線)と今回信号を追求した赤線の比較です。
これを見ると黒線は燃料の噴射や点火時期の不安定が一目瞭然でエンジンパワーの陰に隠れて、知らずに回しているだけです。(見やすいように黒線と赤線は時間のオフセットをしています)
純正ECUだったら大丈夫なんでしょうか?いえいえ純正が一番酷いです。ECUが信号を読めずエラーが出る事は日常茶飯事ですよ。だから知らずに回してるだけです。
一度やってみたいのはポンカム+ブーストアップクラスに今回の制御系を見直したものでセッティングした場合にどれだけの物に仕上がるかを試してみたいです。
SSタービンクラスより早いかもしれませんよ~(*`艸´)ウシシシ
色々と書きましたが、このようなテストや悪い所を見つけ良くしていこうと思うとMoTeC M600を使用しないと信号の状態や正確さがみれません。どのくらい良くなったかを信号側から見る事が出来ないんですよ。
信号の精度を上げる方法ですが、予算もありますのでステップ1 ステップ2 ステップ3と3段階に分けて考えています。
通常はステップ1でMoTeC施工時には内容に入っています。しかしクランク角センサーの経年劣化により状態が悪い物もありますので要注意ですね。
ステップ2になると1より6000rpm以上の信号の安定性が更に向上し性能が上がります。
ステップ3になるとRBでは究極の仕様です。エンジンの仕様によっては「信号だけの精度を上げただけ」で高回転域で18馬力の向上が見られエンジンノイズの低減とスムーズな回転上昇が得られました。
黒線ノーマル/赤線MoTeC






